Integral
| Cálculo |
|---|
|
Cálculo Definições
Conceitos
Regras de derivação
|
Cálculo integral
Definições
Integração por
|
Série
Testes de convergência
|
Cálculo vetorial
|
Cálculo com múltiplas variáveis Formalismo
Definições
|
Cálculo especializado
|
No cálculo, a integral[nota 1] de uma função foi criada originalmente para determinar a área sob uma curva no plano cartesiano[1] e também surge naturalmente em dezenas de problemas da física, como por exemplo na determinação da posição em todos os instantes de um objeto, se for conhecida a sua velocidade instantânea em todos os instantes. [carece de fontes]
Diferentemente da noção associada de derivação, existem várias definições para a integração, todas elas visando a resolver alguns problemas conceituais relacionados a limites, continuidade e existência de certos processos utilizados na definição. Estas definições diferem porque existem funções que podem ser integradas segundo alguma definição, mas não podem segundo outra.[1]
O processo de se calcular a integral de uma função é chamado de integração.[2] A integral indefinida também é conhecida como antiderivada.
Índice
1 Definição formal e notação
1.1 Integral definida
1.2 Integral indefinida
2 Teorema Fundamental do Cálculo
3 Cálculo de integrais definidas
3.1 Integral de polinômios
3.1.1 Exemplo de integração de polinômios
4 Passo-a-Passo
4.1 Fórmula das Primitivas
5 Aplicação do teorema fundamental do Cálculo
6 Exemplos de integração
7 Aplicações de integrais na Física
7.1 Exemplo
8 Integrais em coordenadas polares
9 Definições de integral
10 Notas
11 Referências
12 Ver também
Definição formal e notação |
Integral definida |

Integrando a área de uma função abaixo de uma curva
Seja f{displaystyle f}
![{displaystyle [a,b].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3ba5cb29655f824ce80a0b6a32d9326d0e8742cd)
| Em linguagem matemática | Em português |
|---|---|
S=∫abf(x)dx{displaystyle S={int _{a}^{b}}{f(x)}dx} | S{displaystyle S}  é a integral da função f(x),{displaystyle {f(x)},} é a integral da função f(x),{displaystyle {f(x)},} no intervalo entre a{displaystyle a} no intervalo entre a{displaystyle a} e b.{displaystyle b.} e b.{displaystyle b.} ∫{displaystyle {int }} ∫{displaystyle {int }} é o sinal da integral, f(x){displaystyle {f(x)}} é o sinal da integral, f(x){displaystyle {f(x)}} é o integrando e os pontos a{displaystyle {a}} é o integrando e os pontos a{displaystyle {a}} e b{displaystyle {b}} e b{displaystyle {b}} são os limites (inferior e superior, respectivamente) de integração. são os limites (inferior e superior, respectivamente) de integração. |
Onde f:[a,b]→R{displaystyle {f}:left[{a},{b}right]rightarrow mathbb {R} }![{f}: left [ {a},{b} right ] rightarrow mathbb{R}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5cafa60e0892e174fdae3b565d4292a5d69f9e4) | f{displaystyle {f}}  é uma função com domínio no espaço fechado [a,b] (com a≤x≤b{displaystyle {a}leq xleq {b}} é uma função com domínio no espaço fechado [a,b] (com a≤x≤b{displaystyle {a}leq xleq {b}} ) e com imagem no conjunto dos números reais ) e com imagem no conjunto dos números reais |

Integral da função sen(x3π−1)+4{textstyle {text{sen}}left({frac {x}{3}}pi -1right)+4}
 sobre o intervalo [1,9].{displaystyle [1,9].}
sobre o intervalo [1,9].{displaystyle [1,9].}![{displaystyle [1,9].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b84df05bb6e39f30e9e69dff9bae817dc7fca818) O valor da soma de Riemann truncada em n{displaystyle n}
O valor da soma de Riemann truncada em n{displaystyle n} sub-intervalos é indicada por S.{displaystyle S.}
sub-intervalos é indicada por S.{displaystyle S.}
A ideia desta notação utilizando um S comprido é generalizar a noção de somatório[4]. Isto porque, intuitivamente, a integral de f(x){displaystyle {f(x)}}![[a,b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)




O que é o integral (animação)
| Em linguagem matemática | Em português |
|---|---|
∫abf(x)dx=limΔx→0∑i=0nf(xi∗)Δx{displaystyle {int _{a}^{b}}{f(x)}dx=lim _{Delta xto 0}sum _{i=0}^{n}{f(x_{i}^{*})}Delta x} | A integral de f(x){displaystyle {f(x)}} no intervalo [a,b] é igual ao limite do somatório de cada um dos valores que a função f(x) assume, de 0 a n, multiplicados por Δx.{displaystyle Delta x.} O que se espera é que quando n for muito grande o valor da soma acima se aproxime do valor da área abaixo da curva e, portanto, da integral de f(x){displaystyle {f(x)}} no intervalo. Ou seja, que o limite esteja definido. A definição de integral aqui apresentada é chamada de soma de Riemann, mas há outras formas (equivalentes). O que se espera é que quando n for muito grande o valor da soma acima se aproxime do valor da área abaixo da curva e, portanto, da integral de f(x){displaystyle {f(x)}} no intervalo. Ou seja, que o limite esteja definido. A definição de integral aqui apresentada é chamada de soma de Riemann, mas há outras formas (equivalentes). |
onde Δx=b−an{displaystyle Delta x={frac {b-a}{n}}} | Comprimento dos pequenos subintervalos nos quais se divide o intervalo [a,b]. Os extremos destes intervalos são os números x0(=a),x1,...xn(=b).{displaystyle x_{0}left(=aright),x_{1},...x_{n}left(=bright).} |
onde xi∗=limΔx→0i⋅Δx+a{displaystyle x_{i}^{*}=lim _{Delta xto 0}icdot Delta x+a} | Equivale a um ponto num intervalo de a{displaystyle a} até b{displaystyle b} da função quando o valor do número de termos n{displaystyle n} tende a infinito ou equivalentemente quando o valor de Δx{displaystyle Delta x} tende a 0,nesse caso a letra i{displaystyle i} da função quando o valor do número de termos n{displaystyle n} tende a infinito ou equivalentemente quando o valor de Δx{displaystyle Delta x} tende a 0,nesse caso a letra i{displaystyle i} define o enésimo termo de uma sequência infinita ligada aos valores que cada xi∗{displaystyle x_{i}^{*}} define o enésimo termo de uma sequência infinita ligada aos valores que cada xi∗{displaystyle x_{i}^{*}} assumirá. assumirá. |
onde f(xi∗){displaystyle {f(x_{i}^{*})}} | Valor ("altura") da função f(x){displaystyle {f(x)}} quando x é igual ao ponto amostral xi∗,{displaystyle x_{i}^{*},} definido como um ponto que está no subintervalo [xi−1,xi]{displaystyle left[x_{i-1},x_{i}right]} definido como um ponto que está no subintervalo [xi−1,xi]{displaystyle left[x_{i-1},x_{i}right]}![left [ x_{i-1},x_i right ]](https://wikimedia.org/api/rest_v1/media/math/render/svg/a8031316e6005bbca07d1abf3f56cdb6ceca6e47) (podendo até mesmo ser um destes pontos extremos do subintervalo). (podendo até mesmo ser um destes pontos extremos do subintervalo). |
Uma integral definida pode ser própria ou imprópria, convergente ou divergente. Neste último caso, ela representa uma área infinita.
Integral indefinida |
A integral indefinida de f(x){displaystyle f(x)}
∫f(x)dx=F(x)+C{displaystyle int {f(x)}dx=F(x)+C}

em que C{displaystyle C}





É importante saber-se distinguir a integral definida da integral indefinida. Uma integral definida é um número, enquanto uma integral indefinida é uma função (ou uma família de funções). Como consideramos a integral como uma antiderivada, ou seja, o inverso da derivada, colocamos a constante C{displaystyle C}

Teorema Fundamental do Cálculo |
O Teorema Fundamental do Cálculo estabelece que se f(x){displaystyle f(x)}![{displaystyle [a,b],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2d493b840f8326ba81ff9d95b4edf1effd5f2842)

onde, F(x){displaystyle F(x)}
De forma mais geral, este teorema afirma que se f(x){displaystyle f(x)}

F(x)=∫axf(t)dt{displaystyle F(x)=int _{a}^{x}f(t)dt}

é uma antiderivada de f(x){displaystyle f(x)}
ddx[∫axf(t)dt]=f(x).{displaystyle {frac {d}{dx}}left[int _{a}^{x}f(t)dtright]=f(x).}![{displaystyle {frac {d}{dx}}left[int _{a}^{x}f(t)dtright]=f(x).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/203dd15914c1112f614c9080138249991764ee9c)
Seja f(x){displaystyle f(x)}


![[a, x]](https://wikimedia.org/api/rest_v1/media/math/render/svg/692f0edd0d40232c8a69ed5de7b142e1e343eff7)



Cálculo de integrais definidas |
Suponhamos uma função f(x){displaystyle f(x)}



∫abt(x)dx≤∫abf(x)dx≤∫abs(x)dx{displaystyle int limits _{a}^{b}t(x)dxleq int limits _{a}^{b}f(x)dxleq int limits _{a}^{b}s(x)dx}

Onde a{displaystyle a}
b−an{displaystyle {frac {b-a}{n}}}

onde n é um número inteiro positivo que representa o número de retângulos, ou o número de subintervalos de [a,b].{displaystyle [a,b].}
b−anf(xk){displaystyle {frac {b-a}{n}}f(x_{k})}

onde k{displaystyle k}



Já que t(x){displaystyle t(x)}
∑k=1nf(xk)b−an≤∫abf(x)dx≤∑k=0n−1f(xk)b−an{displaystyle sum _{k=1}^{n}f(x_{k}){frac {b-a}{n}}leq int limits _{a}^{b}f(x)dxleq sum _{k=0}^{n-1}f(x_{k}){frac {b-a}{n}}}

b−an∑k=1nf(xk)≤∫abf(x)dx≤b−an∑k=0n−1f(xk){displaystyle {frac {b-a}{n}}sum _{k=1}^{n}f(x_{k})leq int limits _{a}^{b}f(x)dxleq {frac {b-a}{n}}sum _{k=0}^{n-1}f(x_{k})}

Isso significa que a integral de qualquer função f(x){displaystyle f(x)}
Pelas duas equações anteriores fica claro a razão da integral ser denotada com um dx,{displaystyle dx,}
Integral de polinômios |
Começando pela desigualdade[9][10]
∑k=1n−1kp<np+1p+1<∑k=1nkp{displaystyle sum _{k=1}^{n-1}k^{p}<{frac {n^{p+1}}{p+1}}<sum _{k=1}^{n}k^{p}}

Multiplicamos todos os termos por bp+1np+1{displaystyle {frac {b^{p+1}}{n^{p+1}}}}

bn∑k=1n−1(kbn)p<bp+1p+1<bn∑k=1n(kbn)p{displaystyle {frac {b}{n}}sum _{k=1}^{n-1}left({frac {kb}{n}}right)^{p}<{frac {b^{p+1}}{p+1}}<{frac {b}{n}}sum _{k=1}^{n}left({frac {kb}{n}}right)^{p}}

Fazendo f(x)=xp{displaystyle f(x)=x^{p}}


bn∑k=0n−1f(xk)<bp+1p+1<bn∑k=1nf(xk){displaystyle {frac {b}{n}}sum _{k=0}^{n-1}f(x_{k})<{frac {b^{p+1}}{p+1}}<{frac {b}{n}}sum _{k=1}^{n}f(x_{k})}

Portanto
∫0bxpdx=bp+1p+1{displaystyle int limits _{0}^{b}x^{p}dx={frac {b^{p+1}}{p+1}}}

Podemos, fazendo uso da propriedade aditiva das integrais[11], generalizar para todo intervalo [a,b]:{displaystyle [a,b]:}![{displaystyle [a,b]:}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c0cff6fc734eac7d403d3185f8b916081cc696fb)
∫abxpdx=∫0bxpdx−∫0axpdx{displaystyle int limits _{a}^{b}x^{p}dx=int limits _{0}^{b}x^{p}dx-int limits _{0}^{a}x^{p}dx}

∫abxpdx=bp+1−ap+1p+1{displaystyle int limits _{a}^{b}x^{p}dx={frac {b^{p+1}-a^{p+1}}{p+1}}}

Que também pode ser escrito como:
∫abxpdx=xp+1p+1|ab{displaystyle int limits _{a}^{b}x^{p}dx={frac {x^{p+1}}{p+1}}{Biggr |}_{a}^{b}}

Exemplo de integração de polinômios |
A=∫252x2dx{displaystyle A=int limits _{2}^{5}2x^{2}dx}

Pelas propriedades das integrais, a constante 2{displaystyle 2}
A=2∫25x2=2x33|25=253−233=78{displaystyle A=2int limits _{2}^{5}x^{2}=2{frac {x^{3}}{3}}{Biggr |}_{2}^{5}=2{frac {5^{3}-2^{3}}{3}}=78}

Passo-a-Passo |
Fórmula das Primitivas |

Exemplo:
Cada membro da função é tratado como uma função em separado, para em seguida ser efetuada a soma entre eles e gerar outra função, a função na qual se substitui o valor de X pelos valores do intervalo. Feito isso, usa-se o teorema do cálculo para chegar ao valor da integral.
- No intervalo (0,3)


Aqui usa-se a Fórmula da Primitiva em cada integral.

Gera-se a outra função, que será usada para substituir os valores do intervalo.

Para x = 0

Para x = 3


Aplicação do teorema fundamental do Cálculo |
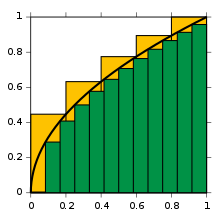
Aproximações da integral de √x de 0 a 1, com ■ 5 amostras à direita (acima) e ■ 12 amostras à esquerda (abaixo)


Exemplos de integração |
Estas são as integrais de algumas das funções mais comuns:


Por definição a barra f(x)|ab{displaystyle f(x)|_{a}^{b}}

Aplicações de integrais na Física |
Uma das mais famosas aplicações das integrais é no conceito físico de trabalho. Na Física, o trabalho é definido como a quantidade de energia transferida ao aplicar-se uma força produzindo um deslocamento. Matematicamente, o trabalho realizado por uma força constante é expresso pela equação[12]:
W=Fx{displaystyle W=Fx}

Onde W{displaystyle W}

W=∫abf(x)dx{displaystyle W=int _{a}^{b}f(x)dx}

onde f(x){displaystyle f(x)}
Exemplo |
Suponhamos que para mover uma partícula se aplica uma força dada pela função[14]
f(x)=x2+2x{displaystyle f(x)=x^{2}+2x}

onde x{displaystyle x}

W=∫13(x2+2x)dx=x33+x2|13=503{displaystyle W=int _{1}^{3}(x^{2}+2x)dx={frac {x^{3}}{3}}+x^{2}{Biggr |}_{1}^{3}={frac {50}{3}}}

Integrais em coordenadas polares |
A integral pode ser generalizada para funções polares considerando funções polares em escada assim como na integral de funções em coordenadas cartesianas[15]. Definindo uma função polar f{displaystyle f}






12(θk−θk−1)sk2{displaystyle {frac {1}{2}}(theta _{k}-theta _{k-1})s_{k}^{2}}

e de t{displaystyle t}
12(θk−θk−1)tk2{displaystyle {frac {1}{2}}(theta _{k}-theta _{k-1})t_{k}^{2}}

Logo, as áreas sob s{displaystyle s}
a(S)=12∫abs2(θ)dθ{displaystyle a(S)={frac {1}{2}}int _{a}^{b}s^{2}(theta )dtheta }

a(T)=12∫abt2(θ)dθ{displaystyle a(T)={frac {1}{2}}int _{a}^{b}t^{2}(theta )dtheta }

Em que dθ{displaystyle dtheta }

∫abs2(θ)dθ≤2a(F)≤∫abf2(θ)dθ{displaystyle int _{a}^{b}s^{2}(theta )dtheta leq 2a(F)leq int _{a}^{b}f^{2}(theta )dtheta }

Logo
a(F)=12∫abf2(θ)dθ{displaystyle a(F)={frac {1}{2}}int _{a}^{b}f^{2}(theta )dtheta }

E esta é a definição da integral de uma função polar.
Definições de integral |
Para definições do processo de integração mais rigorosas veja os links abaixo:
- Integral de Riemann
- Integral de Lebesgue
- Integral de Riemann-Stieltjes
- Integral de Henstock–Kurzweil ou integral de Gauge
Notas |
↑ Em Portugal, a comunidade técnica utiliza integral como nome masculino. Por exemplo: o integral de f (x) em [a, b].
Referências
↑ ab Charles Doss, An Introduction to the Lebesgue Integral, [em linha]
↑ John Radford Young, The Elements of the Integral Calculus: With Its Applications to Geometry and to the Summation of Infinite Series. Intended for the Use of Mathematical Students in Schools and Universities (1839), Section I, On the Integration of Differential Expressions of a Single Variable, Chapter I, Fundamental Principles of Integration, p.1 [google books]
↑ ab Stewart (2002), p. 378.
↑ W3C (2006), Arabic mathematical notation (em inglês)
↑ Piskounov, Nikolai Semenovich; Cálculo Diferencial e Integral; Edições Lopes da Silva; 12ª edição, 2002; 2 vols.
↑ Stewart (2002), p. 401.
↑ Stewart, James. Cálculo - Volume 1. [S.l.: s.n.] 360 páginas|acessodata=requer|url=(ajuda)
↑ Howard, Anton (2009). Cálculo - Volume 1 8 ed. [S.l.]: Bookman. ISBN 9788560031634
↑ Apostol, Tom. Cálculo, volume 1. [S.l.: s.n.]
↑ «Prove a formula for b^p - a^p and a resulting inequality - Stumbling Robot». Stumbling Robot (em inglês). 10 de julho de 2015
↑ Apostol, Tom. Cálculo, volume 1. [S.l.: s.n.]
↑ Stewart, James. Cálculo - Volume 1. [S.l.: s.n.] 404 páginas
↑ Stewart, James. Cálculo - Volume 1. [S.l.: s.n.] 405 páginas
↑ Stewart, James. Cálculo - Volume 1. [S.l.: s.n.] 405 páginas
↑ Apostol, Tom. Cálculo - Volume 1. [S.l.: s.n.] 131 páginas|acessodata=requer|url=(ajuda)
↑ «Área do setor circular». Brasil Escola. Consultado em 16 de junho de 2018
Ver também |
- Derivada
- Tábua de integrais
- Primitiva
- Integração numérica
- Métodos de integração
- Integral múltipla



